
El objetivo de cero muertes en las carreteras sigue estando en el horizonte del año 2050. Para ello, Naciones Unidas proclamó el periodo 2021-2030 como el Segundo Decenio de Acción para la Seguridad Vial cuya finalidad es reducir a la mitad las cifras de muertes y lesiones graves en accidentes de tráfico. De esta manera, los Estados Miembros están llevando a cabo una serie de iniciativas en materia de seguridad vial, pero también las infraestructuras y los vehículos están experimentando cambios sorprendentes que transformarán la concepción actual de la conducción.
J. Bernal | 14/01/2022La tecnología tiene un peso importante para conseguir la disminución de la siniestralidad. Cada vez más se habla de la automatización de los vehículos y de su incidencia en la seguridad vial. Sin ir más lejos, a partir de este año serán obligatorios en los vehículos nuevos hasta 15 sistemas ADAS de asistencia y ayuda a la conducción.
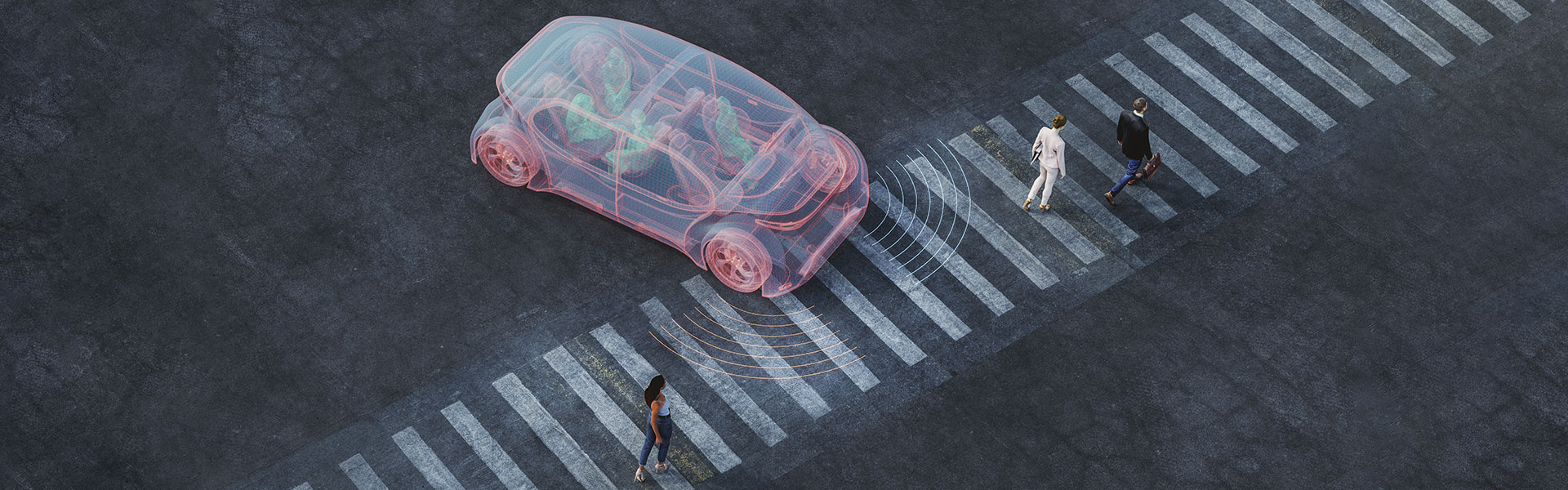
Los sistemas ADAS, por su traducción al español, son Sistemas Avanzados de Asistencia a la Conducción. Se trata de un conjunto de tecnologías orientadas a la prevención de los accidentes de tráfico, por lo cual actúan sobre distintos elementos que pueden impedirlos o minorar sus consecuencias. Por ejemplo, en la detección de peatones, en aviso de colisión o en el control de crucero adaptativo. No sólo son clave para la seguridad vial, sino que también son una pieza fundamental para mejorar el nivel de automatización de los vehículos.
Una de las últimas innovaciones de los sistemas ADAS son, sin lugar a dudas, los sensores LiDAR 3D, también conocidos como escáneres láseres, basados en Tiempo de Vuelo (TOF) que, a través de un pulso de luz láser, detectan la distancia a una superficie (densa) sobre la que incide. Principalmente han sido utilizados en campos como la cartografía, pero también pueden utilizarse en la conducción autónoma. Es lo que se desprende de la tesis doctoral del profesor Miguel Clavijo, que consiguió el XVIII Premio Abertis de Investigación en Seguridad Vial.

Conscientes de la importancia de la vinculación con el mundo académico para el progreso social y económico, Abertis, mediante la red internacional de cátedras, promueve la formación, la investigación y la transferencia de conocimiento entre universidad y empresa. Con ella se fomenta la generación y divulgación de nuevos conocimientos e innovaciones en los diferentes campos de actividad, poniéndolos al servicio de toda la sociedad y de la comunidad técnica y educativa y cuidando y ayudando al talento que las universidades son capaces de aflorar y de canalizar.
La red de Cátedras Abertis está formada por las establecidas en España (Universidad Politécnica de Madrid y Universidad Politécnica de Barcelona, BarcelonaTech), Francia (École des Ponts-ParisTech), Puerto Rico (Universidad de Puerto Rico), Chile (Pontificia Universidad Católica de Chile) y Brasil (Universidad de São Paulo). Ahora, se añaden dos nuevas cátedras en Italia (Universidad de Padua) y México (Universidad Nacional Autónoma de México).

La tesis premiada propone una serie de algoritmos basados en sensores LiDAR 3D que mejoran las capacidades de percepción del vehículo autónomo. De esta manera, destaca la versatilidad de estos sensores para ofrecer distintas soluciones, desde la detección de obstáculos y peatones hasta la mejora de posicionamiento. Estos desarrollos mejoran el entendimiento del entorno del vehículo y, de este modo, la seguridad de la conducción autónoma.
Tal y como señala Clavijo, “algunos de estos sensores son rotativos e incluyen varias capas con diferentes inclinaciones, por lo que el resultado que se obtiene es una nube de puntos representativa del entorno”. Además, “estos puntos suelen contener la información de las coordenadas x, y, z y la reflectividad donde ha incidido el láser. Al tener una información tridimensional del entorno, hace que tengan una gran aplicabilidad a los algoritmos de percepción del vehículo autónomo”.
Para ello, la investigación utilizó aplicaciones basadas en Deep Learning para el posicionamiento de este tipo de automóviles mediante redes convolucionales, un tipo de redes neuronales que se emplean como técnica principal para el reconocimiento, clasificación o segmentación de imágenes. Han supuesto un gran avance en el tratamiento de imágenes en ámbitos y sectores diversos: la medicina, la ingeniería, la seguridad o el entretenimiento.

Por otra parte, la tesis incide en el hecho de extraer la mayor información posible y funcionalidad de los sensores LiDAR 3D para complementar a otros sistemas actuales que utilizan sensores diferentes como cámaras o radares. Además, una de las mayores limitaciones que encuentra el vehículo autónomo es su despliegue en entornos complejos, como pueden ser los escenarios off-road, zonas con poca información disponible o bien áreas muy dinámicas donde la información obtenida puede ser confusa.
En este sentido, “las aportaciones de la investigación”, apunta Clavijo, “establecen un punto de partida para seguir indagando en la mejora del posicionamiento del vehículo en zonas con poca o nula señal por satélite, la detección de obstáculos en entornos todoterreno o la caracterización de la vía para ampliar el conocimiento del espacio por donde circula el vehículo”.

El objetivo de alcanzar los cero accidentes de tráfico tiene sus miras puestas en la automatización. Cada vez son más los vehículos que aparecen con funcionalidades sorprendentes, haciéndolos más seguros e inteligentes.
Aunque a nivel tecnológico se espera ir avanzando de forma progresiva, existen aún una serie de retos que deben superarse para que estos vehículos sean una realidad. Entre otros, la convivencia de conductores humanos y vehículos autónomos, la adaptación de las infraestructuras, la responsabilidad ante accidentes que puedan ocurrir o la aceptación social de estas tecnologías

Con el fin de medir la capacidad de conducción autónoma de un vehículo, la SAE (Sociedad de Ingenieros Automotrices), organismo de normalización del automóvil, estableció una división de seis niveles que van del 0 al 5. Y según estos niveles se puede medir cómo de avanzada es la tecnología de los coches autónomos.
Hay que tener en cuenta además que para que un coche circule sin la intervención de un conductor no sólo es necesario que disponga de la tecnología necesaria, sino que tiene que interactuar con el entorno, ya sea con otros vehículos o con las infraestructuras viales, para recibir información del estado del tráfico, de las vías o de posibles incidencias. Por lo tanto, la autonomía total requerirá de la implantación de la Inteligencia Artificial mediante un sistema de Internet de las Cosas.
“Por todo ello, no se puede afirmar ni desmentir que la conducción autónoma es una realidad hoy en día. Lo que sí se puede afirmar es que veremos a vehículos con mayor capacidad de automatización en los próximos años”, concluye Clavijo.